Південнокорейські інженери створили механічний аналог язика хамелеона для дронів (ВІДЕО)
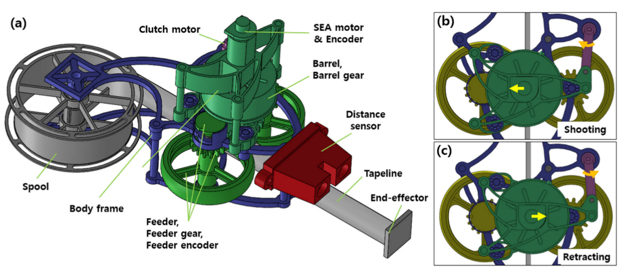
Механічний аналог язика здатний майже миттєво хапати комах і притягувати їх до себе. Пристрій складається із заводної пружини, яка спочатку різко висуває металеву стрічку вперед, а потім тягне її назад за допомогою зчеплення, що може переміщатися між двома приводними дисками. Вони продемонстрували, що захоплення здатне повністю висунутися і повернутися назад менш ніж за 550 мілісекунд, а його маса досить мала для установки на популярний квадрокоптер. Стаття опублікована в журналі IEEE Robotics and Automation Letters.
Дрони все частіше використовуються не тільки для зйомки, але і для доставки невеликих посилок. Наприклад, їх зручно використовувати для швидкої доставки крові та інших матеріалів для медичного аналізу з однієї клініки в іншу. При цьому дотепер у дронів є велика проблема з часом польоту, яка, як правило, становить близько пів години. А оскільки дрон-постачальник або зависає, або сідає для забору і видачі вантажу, на це даремно витрачається значна частина місткості акумулятора. Нещодавно японські інженери показали проєкт станції, яка чіпляє на дрона, що летить посилку без зупинки, підлаштовуючись під його траєкторію, але для застосування такого методу забору і скидання вантажу потрібно модифікувати наземну інфраструктуру.
Лі Дон-Чжун (Dong-Jun Lee) і Чжон Гван-Пхіль (Gwang-Pil Jung) із Сеульського національного університету науки і технологій створили прототип захоплення, який працює з високою швидкістю і при цьому має досить малу вагу, щоб бути встановленим на типовий квадрокоптер. Розробники розповіли, що при створенні механізму вони були натхненні язиком хамелеона — він здатний витягуватися на відстань у півтори довжини тіла тварини, причому зі швидкістю до трьох з половиною метрів у секунду. Завдяки цьому здобич не встигає зреагувати на атаку. Ключова особливість язику і створеного авторами механізму полягає не тільки у швидкості поступального руху, а й в тому, що після досягнення мети він майже з такою ж швидкістю і майже без затримки повертається назад.
Інженери реалізували швидку швидкість при русі в обидва боки завдяки застосуванню двох приводів і переміщуваного між ними зчеплення. У центрі розташовується металева стрічка рулетки, скручується в спіраль. З боків від стрічки розташовані два притискачі колеса-приводу. А між цими колесами встановлено рухливий блок із запальною спіральною пружиною. Завдяки тому, що він прикріплений до актуатора збоку, він може переміщатися з одного боку в бік і стикатися з шестернями одного з двох приводів, тим самим визначаючи напрям руху стрічки. Це дозволило не використовувати дві окремі спіралі або два мотори, а просто перемикати один і той же блок між приводами.
Прототип захоплення має вагу 117,5 грама і розміри 12 на 8,5 на 8,5 сантиметра. Інженери протестували його, відстежуючи переміщення за допомогою високошвидкісної камери. Результати тесту показали, що захоплення здатне витягнутися на відстань 80 сантиметрів і повернутися назад, витративши на це менш як 550 мілісекунд, і при цьому маючи на кінці вантаж масою 30 грамів. Крім стаціонарних тестів розробники також показали кілька перших польотів серійного квадрокоптера з закріпленим і працюючим прототипом захоплення.